2014 - 2015
Opentrons Platform Prototype
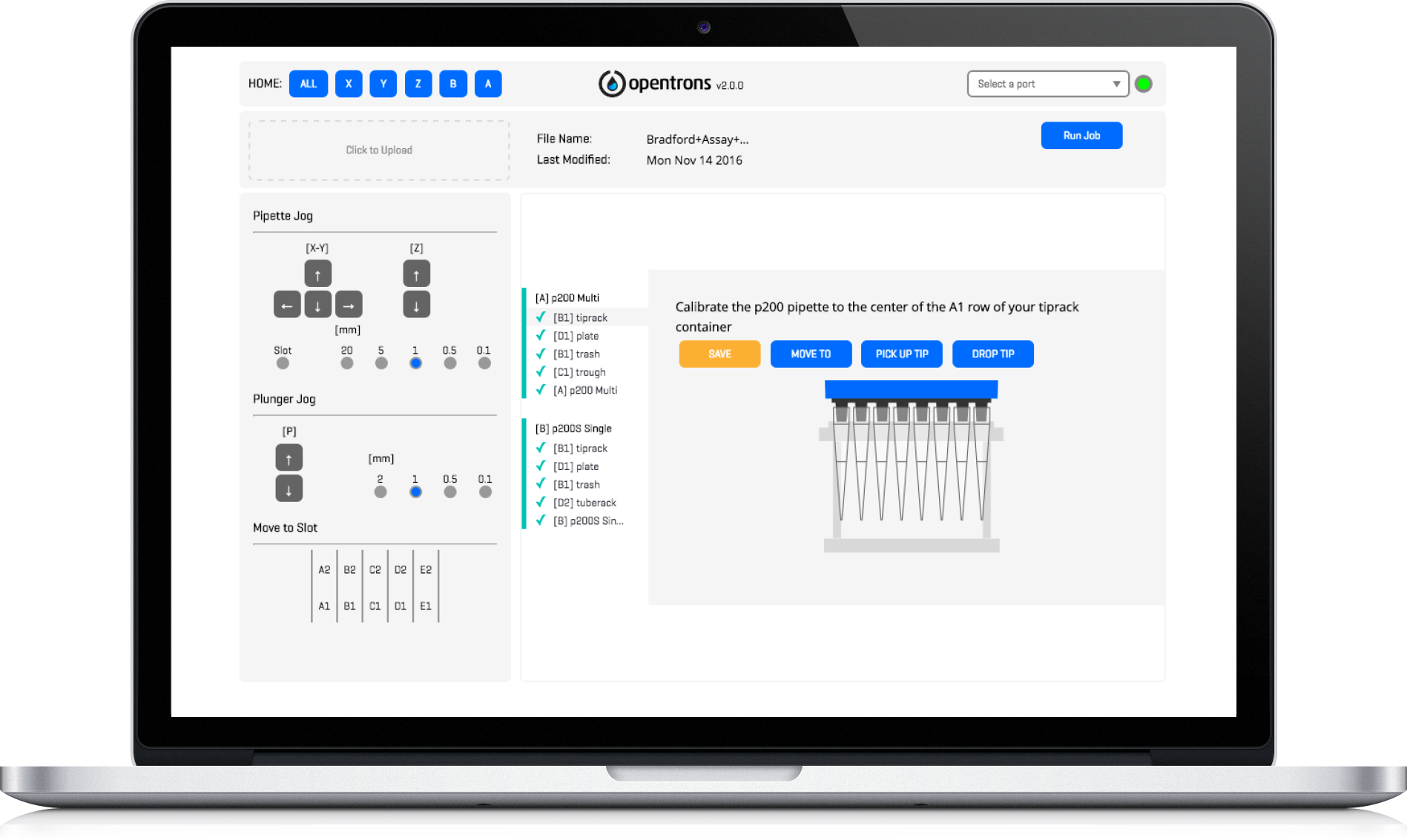
I worked with Opentrons to build a prototype of their liquid-handling platform’s software stack.
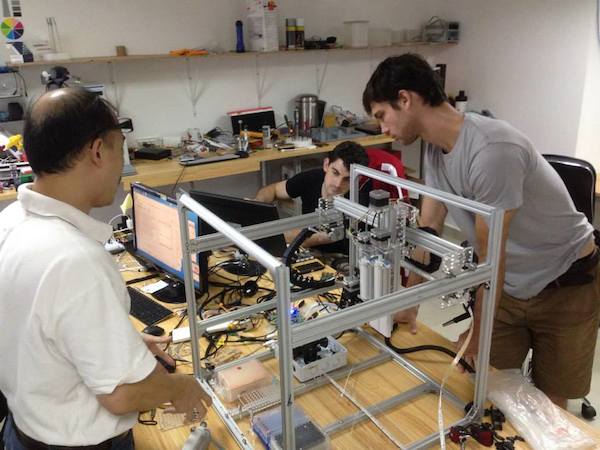
Below is a quick video from 2015, demonstrating the prototype. All designs and software in the video (excluding the motor controller) were made by me.
The commands were based on the Auto-Protocol standard proposed by Transcriptics, and the system was written in NodeJS and HTML5.
PROJECTS
automation